Prof. Vito Cacucciolo vito.cacucciolo@poliba.it


Current positions
Associate Professor at Politecnico di Bari, Italy since 2023
CEO of Omnigrasp Srl since 2022
Research affiliate at MIT, US since 2022
Curriculum vitae Google Scholar profile
Background and titles
2023 ERC StG grantee from European Research Council
2017 PhD from Scuola Superiore Sant’Anna Pisa, Italy (Prof. C. Laschi)
2017 – 2021 Scientist at EPFL Soft Transducers Laboratory (Prof. H. Shea)
2020 – 2021 BRIDGE Fellow (SNSF – Innosuisse)
Robots have the potential to free humans of wearing labour, replace humans in dangerous tasks and augment human abilities. Vito’s long-term goal is to understand physical intelligence and use it to create adaptive materials, human-centred robots, and smart wearables.
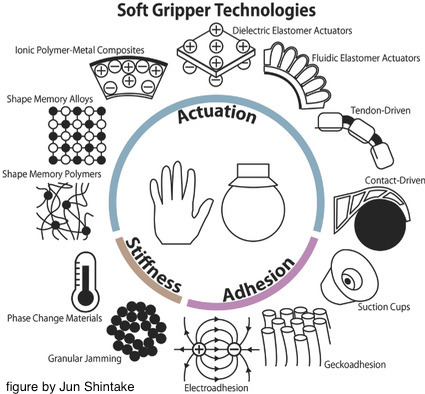
Vito has been the driving force behind the development of the world-first stretchable pumps for use in fluidic artificial muscles, soft exoskeletons and smart wearables, published in Nature in 2019. Vito’s improved electroadhesion soft gripper for delicate and fragile objects can now pick up over 1.5 kg, 1000 times its own weight.